Een van mijn hobby’s is knutselen met elektronica, Dus toen ik zag dat er camera treinen bestonden die naar mijn mening niet voldoende beeldkwaliteit leverde ben ik gaan onderzoeken hoe het beter kan.
Eerst de punten die voor mij belangrijk zijn of verbeterd moeten worden:
- Beeldkwaliteit
- De meeste modellen zenden een analoog signaal of een lage kwaliteit digitaal beeld signaal uit. Deze kan vervolgens worden opgenomen extern van de camera. Hierdoor is verlies van kwaliteit vrijwel onvermijdelijk.
- Stabiliteit
- Vooral bij analoog signaal krijg je snel last van storing in het beeld. Bij digitaal is dit meestal in de vorm van uitvallen van beeld of blokjes in het beeld.
- Snelheid
- Het beeld moet vrijwel zonder vertraging live bekeken kunnen worden.
- Stroom
- De meeste modellen krijgen stroom van de baan. Nu is daar op zichzelf niets mis mee maar zodra de trein stroomloos staat bestaat er de kans dat de camera uitvalt. Daarnaast maak ik thuis gebruik van 2-rail terwijl MSG-de nieuwe waterweg gebruik maakt van 3-rail.
- Opslag
- De beelden die opslagen worden moeten van de hoogste kwaliteit zijn die mogelijk is. De beelden die live uitgezonden worden zijn vanwege bandbreedte altijd van lagere kwaliteit
- Prijs
- Niet onbelangrijk is de prijs, hoe goedkoper hoe beter 😊
Met deze criteria ben ik gaan zoeken naar oplossingen.

Een van de makkelijkste oplossingen is een kant en klare mini HD camera, deze zijn klein hebben een accu ingebouwd en nemen lokaal op op een microSD kaart. Maar dat zou te makkelijk zijn ,daar naast kunnen deze niet live bekeken worden.
Ik heb er voor gekozen om gebruik te maken van een Raspberry pi zero, Waarom? Puur omdat op dat moment de Pi zero nieuw was en ik een excuus zocht om hem te gebruiken. De pi is gecombineerd met een 8MP camera module hierdoor zijn hoge kwaliteit beelden geen probleem.
Het eerste prototype was alles behalve mobiel, deze moest nog aan een usb adapter voor de stroom. Voordat ik mij hierin ging verdiepen ben ik begonnen met het instellen van de software. Voor het opnemen en live bekijken van de camera beelden heb ik gekozen om gebruik te maken van “RPi-Cam-Web-Interface” (https://elinux.org/RPi-Cam-Web-Interface). De reden hiervoor is omdat het alles doet wat ik nodig heb en daarnaast is het heruitvinden van het wiel geen optie voor het eerste prototype. Misschien dat ik in de toekomst mijn eigen software schrijf maar dat kan altijd nog.

Voor het overdragen van live beelden maak ik gebruik van Wifi, Door een oude router als hotspot te gebruiken waarop bedraad weer een laptop aangesloten staan is het mogelijk om de beelden live te bekijken. Door de laptop bedraad aan te sluiten is de camera de enige die draadloos communiceert. Dit zorgt ervoor dat de camera niet op andere draadloze apparaten hoeft te wachten en dus de volledige bandbreedte tot zijn beschikking heeft.
Nu alles software matig werkt is stroom de volgende stap. Zoals eerder vermeld moet de camera werken on afhankelijk van de baan stroom. Daarnaast moet het een lange tijd kunnen opnemen zonder herladen te worden. Daarom is gekozen om gebruik te maken van een USB powerbank van 3350mAh. Tijdens testen heb ik ondervonden dat de pi en camera hier minimaal 7 uur op kunnen draaien.

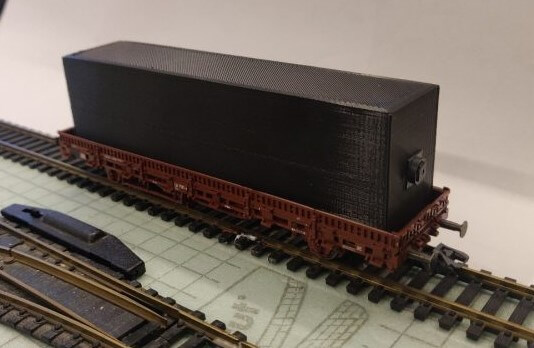
Okey nu werk alles en het is mobiel. Maar waar bouw je het in? Omdat ik de camera op zowel 2 als 3 rail systemen wil kunnen gebruiken kan ik het niet in een van mijn locs inbouwen. Daarom maak ik gebruik van een platte wagon waarop het gehele pakket geplaats kan worden.

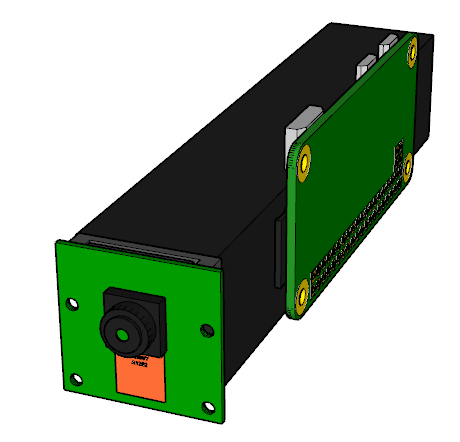
Na enige tijd vond ik het wel tijd om de camera aan te kleden. Het idee is om de camera te vermommen als een container. Het enige probleem is dat alle containers die ik heb niet groot genoeg zijn om de camera in te plaatsen. Gelukkig bestaan er tegenwoordig 3D printers, na enige ontwerp tijd en 2,5 uur printen had ik een behuizing voor de camera.
De volgende stap die nog moet komen is het spuiten of stickeren van een container uiterlijk. Maar dit staat nog gepland voor de toekomst.